









TOF LiDAR : un composant essentiel des robots d'inspection
Contexte du projet
Les gares ferroviaires à grande vitesse, en tant que plaques tournantes essentielles du réseau ferroviaire à grande vitesse, accueillent chaque jour des dizaines de milliers de voyageurs et des milliers de wagons. Ces gares doivent procéder à des inspections détaillées sur plus de dix mille wagons chaque jour, ce qui constitue sans aucun doute une tâche ardue et fastidieuse. En raison des exigences particulières de l'exploitation des trains à grande vitesse, les travaux d'inspection sont généralement programmés aux premières heures du matin pour garantir que tous les contrôles nécessaires sont effectués avant que les trains ne commencent leur exploitation quotidienne.
Cependant, un tel programme de travail non seulement impose une forte pression au personnel d'inspection, mais peut également nuire à la qualité et à l'efficacité des inspections. De plus, en raison des limites des inspections manuelles, certains dangers cachés pour la sécurité sont souvent difficiles à détecter à temps, ce qui peut mettre en danger la sécurité d'exploitation des trains à grande vitesse.

Avantages de l'utilisation de robots d'inspection
Pour résoudre les problèmes susmentionnés, il est absolument nécessaire d'introduire des robots d'inspection pour des inspections intelligentes. Par rapport aux inspections manuelles traditionnelles, les robots d'inspection présentent plusieurs avantages distincts :
• Efficacité d'inspection accrue : les robots d'inspection peuvent fonctionner en continu 24 heures sur 24, 7 jours sur 7, sans être affectés par le temps ni par les conditions météorologiques, ce qui améliore considérablement l'efficacité de l'inspection.
• Coûts de main-d’œuvre réduits : en introduisant des robots d’inspection, le nombre d’inspecteurs peut être considérablement réduit, ce qui réduit les coûts de main-d’œuvre.
• Qualité d'inspection améliorée : équipés de caméras haute définition et de divers capteurs, les robots d'inspection peuvent effectuer des contrôles plus complets et détaillés sur différentes parties des trains à grande vitesse, identifiant les dangers de sécurité cachés.
• Transmission de données en temps réel : les robots d’inspection peuvent transmettre les données d’inspection en temps réel au système back-end, facilitant ainsi l’analyse et le traitement par le personnel.
TOF LiDAR : un composant essentiel des robots d'inspection
Pour garantir un fonctionnement stable des robots d'inspection dans des environnements complexes et dynamiques, le choix de la technologie d'évitement des obstacles est crucial. Les LiDAR TOF des séries LD-05D et LD-20D de DADISICK garantissent un évitement précis des obstacles grâce à leur précision de détection exceptionnelle et à leurs capacités anti-interférences, garantissant que les robots d'inspection peuvent effectuer des tâches de manière sûre et stable dans divers environnements.
Dans l'application des robots d'inspection, le radar laser DADISICK peut exécuter les fonctions suivantes :
• Évitement précis des obstacles : le radar laser DADISICK peut percevoir l'environnement du robot en temps réel, y compris les obstacles fixes et les piétons en mouvement. En calculant avec précision la distance et la vitesse des objets ciblés, le robot peut rapidement prendre des décisions d'évitement des obstacles, garantissant ainsi qu'aucun accident de collision ne se produise pendant le processus d'inspection.
• Transmission de données en temps réel : le radar laser DADISICK peut également transmettre en temps réel les informations acquises sur l'environnement et l'objet cible au système back-end du robot. Pendant le processus d'inspection, le robot peut surveiller et analyser la distance par rapport aux obstacles environnants en temps réel, évitant ainsi les collisions avec les obstacles ou les personnes et améliorant encore la qualité et l'efficacité du travail d'inspection.
| Données techniques | LD-05D | LD-20D | ||
| Principe de fonctionnement | 2D TOF | |||
Sortie E/S | NPN ou PNP | |||
Espace de travail | 0,05 m ~ 5 m | 0,05 m ~ 20 m | ||
| Source laser | 905 nm (classe I) | |||
| Angle d'ouverture | 270° | |||
Fréquence de balayage | 15 Hz / 30 Hz | |||
Résolution angulaire | 0,1° / 0,3° | |||
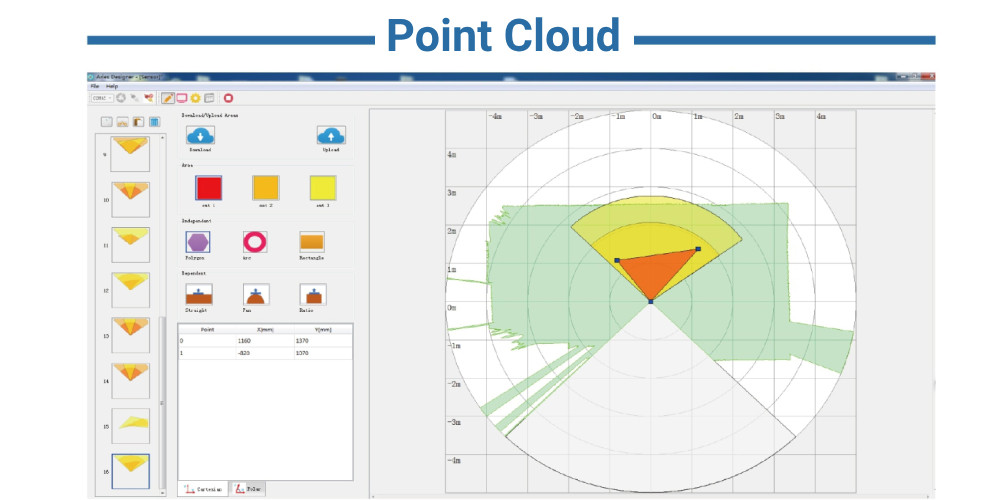
Fonction d'auto-apprentissage | Analyser automatiquement l'environnement et générer des zones | |||
Connexions électriques | Db15 Mâle / Dispersé | |||
Tension d'alimentation | CC 9 V ~ 28 V | |||
Consommation d'énergie | 2 W | |||
Interrupteur d'entraînement | CC 30 V 50 mA max. | |||
Couleur de la coque | Jaune | |||
Indice de protection du boîtier | IP65 | |||
Poids | 150 g (câble non inclus) | |||
Dimensions (L × l × H) | 50 × 50 × 76 mm | |||
Forme d'objet détectable | Presque toutes les formes | |||
Erreur de mesure | ±30 mm | ±30 mm | ||
Nombre d'ensembles de champs | 16 champs, 3 champs de protection simultanés (par jeu de champs) | |||
Type de connexion | Micro-USB | |||
Saisir | Terre/NC × 4 | |||
Sortie de commutation | NPN × 3, état de fonctionnement de l'appareil ; PNP × 3, état de fonctionnement de l'appareil | |||
Temps de retard | 100 ms ~ 10 000 ms (configurable), valeur typique 330 ms | |||
Temps de réponse | 15 Hz : 67 ms ~ 29 949 ms (configurable), valeur typique 134 ms ; 30 Hz : 33 ms ~ 29 997 ms (configurable), valeur typique 66 ms | |||
Indicateur d'état | Indicateur d'état × 1, indicateur de groupe de zones × 3 | |||
Résistance aux vibrations | 10 - 55 Hz, amplitude 0,75 mm, XYZ trois axes, 2 heures par axe ; 50 - 200 Hz, 196 m/s² (20G), vitesse de numérisation 2 min/cycle, XYZ trois axes, 2 heures par axe ; | |||
Température ambiante de fonctionnement | -10 ℃ ~ +55 ℃ | |||
Température de stockage | -30 ℃ ~ +75 ℃ | |||
Immunité à la lumière ambiante | >15 000 lux | |||
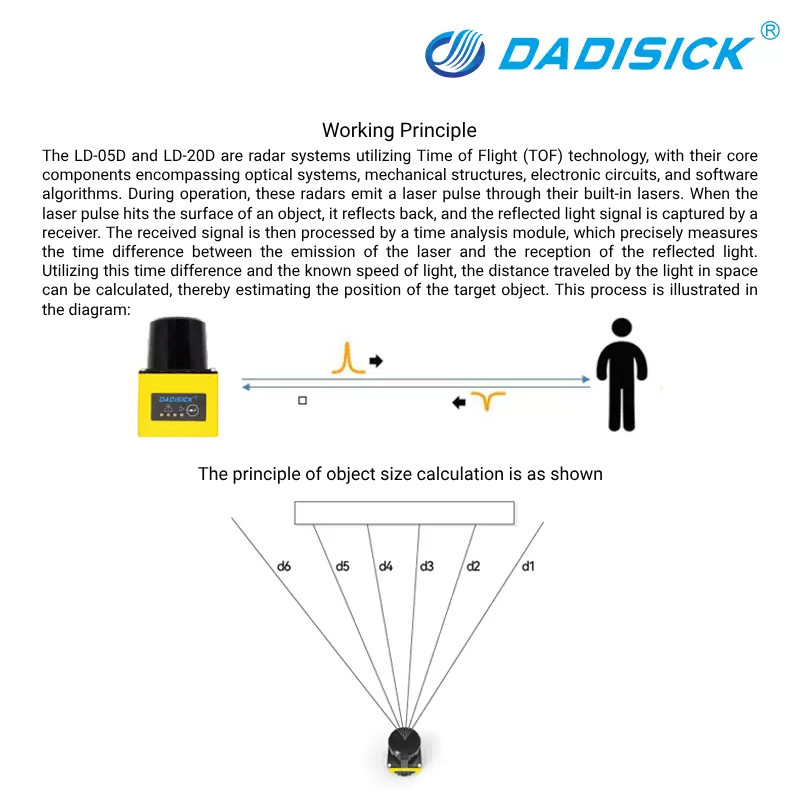
Technologie de mesure de distance à grande vitesse par temps de vol pulsé (TOF)
Les radars LD-05D et LD-20D utilisent la technologie du temps de vol (TOF). Leurs principaux composants sont des systèmes optiques, des structures mécaniques, des circuits électroniques et des algorithmes logiciels. En fonctionnement, ces radars émettent une impulsion laser via leurs lasers intégrés. Lorsque l'impulsion laser frappe la surface d'un objet, elle se réfléchit et le signal lumineux réfléchi est capté par un récepteur. Le signal reçu est ensuite traité par un module d'analyse temporelle, qui mesure précisément la différence de temps entre l'émission du laser et la réception de la lumière réfléchie. En utilisant cette différence de temps et la vitesse connue de la lumière, la distance parcourue par la lumière dans l'espace peut être calculée, estimant ainsi la position de l'objet cible. Ce processus est illustré dans le diagramme :
Autres scénarios d'application du LiDAR
L'utilisation réussie de robots d'inspection dans les gares ferroviaires à grande vitesse n'est que la pointe de l'iceberg de l'utilisation généralisée de la technologie LiDAR. Avec les progrès technologiques continus et l'expansion des scénarios d'application, le LiDAR jouera un rôle important dans divers types de robots.
Robots industriels : Dans le secteur industriel, le LiDAR peut aider les robots à réaliser des fonctions précises de reconnaissance, de positionnement et de préhension d'objets. En scannant et en mesurant les objets dans l'environnement de travail, les robots peuvent déterminer avec précision la position et l'orientation des objets, ce qui permet des opérations et un traitement précis.
Robots de service : dans le secteur des services, le LiDAR peut aider les robots à réaliser des fonctions de navigation autonome, de planification de parcours et d'évitement d'obstacles. Grâce à la détection et à la compréhension en temps réel de l'environnement qui les entoure, les robots de service peuvent offrir aux utilisateurs une expérience de service plus intelligente et plus pratique.
Types de LiDAR de DADISICK : des choix variés pour des applications plus précises
• Options LiDAR d'évitement d'obstacles, de navigation et d'évitement d'obstacles + mesure disponibles
• Angles de balayage de 270°/300°/360° disponibles
• Plage de mesure de 0,05 à 100 mètres avec plusieurs options de plage
• Fréquence de balayage maximale de 30 Hz
• Micro-USB
• Sortie en ligne des données de mesure (y compris les données de distance et d'intensité dans toutes les directions)

Scanner laser de sécurité pour éviter les obstacles 2D TOF 270° de 5 m ou 20 m


